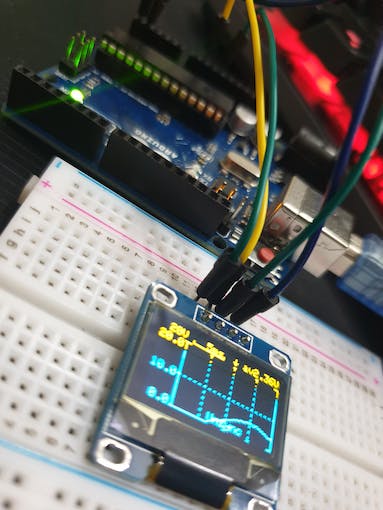
Cómo hacer un mini-osciloscopio en casa con Arduino Nano
 |
|
× | 1 | |||
 |
|
× | 1 | |||
 |
|
× | 9 | |||
 |
|
× | 4 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
tutorial completo
En este video te mostraré cómo hacer tu propio mini osciloscopio en casa. Es simple y fácil de hacer. Este no es mi propio código, solo estoy haciendo un tutorial para ustedes. Para llevar a cabo este proyecto, dependía del código fuente de terceros, cuyo enlace se proporciona a continuación. Si tiene alguna pregunta o sugerencia, no dude en comentar en mi video de youtube y no olvides darle me gusta y suscribirte a mi canal de youtube.
Haga clic aquí para ver el tutorial completo y el código fuente.
Mi GI: https://www.instagram.com/pm.goharian/
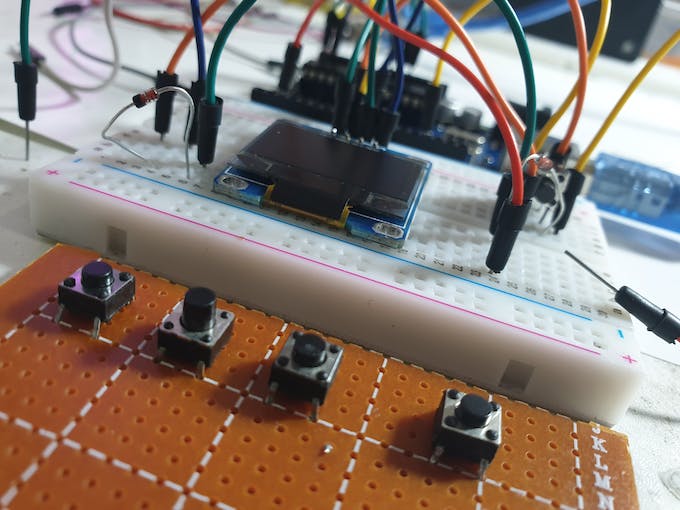
Componentes necesarios
- arduino nano
- Pantalla OLED SSD1306
- 1N4148
- Micro interruptor
- 104 condensador
- Resistencias: 100Ω, 12k, 120k, 510k
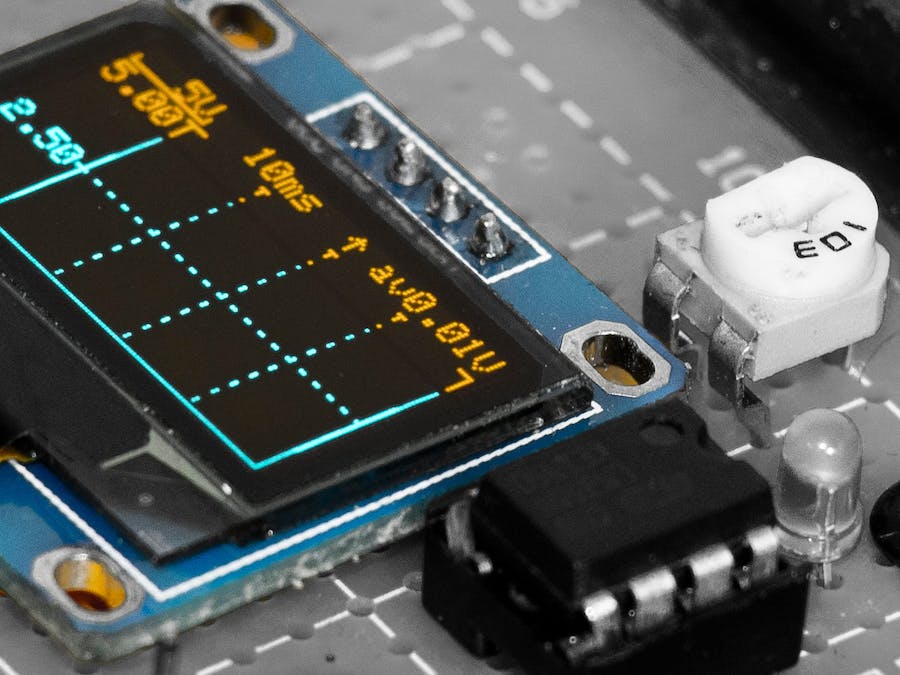
¿Qué es un osciloscopio?
Un «osciloscopio», anteriormente llamado «oscilógrafo», e informalmente conocido como alcance Dónde alcance,CRO (para osciloscopio de rayos catódicos), o DSO (para el osciloscopio de almacenamiento digital más moderno), es un tipo de instrumento de prueba electrónico que muestra gráficamente una señal variable [voltages], generalmente como un gráfico bidimensional de una o más señales contra el tiempo. Otras señales (como sonidos o vibraciones) pueden convertirse en voltajes y mostrarse.
Los osciloscopios muestran el cambio de una señal eléctrica a lo largo del tiempo, con el voltaje y el tiempo como ejes Y y X, respectivamente, en una escala calibrada. Luego, la forma de onda se puede analizar en busca de propiedades como amplitud, frecuencia, tiempo de subida, intervalo de tiempo, distorsión, etc. Los instrumentos digitales modernos pueden calcular y mostrar directamente estas propiedades. Originalmente, calcular estos valores requería medir manualmente la forma de onda contra escalas integradas en la pantalla del instrumento.
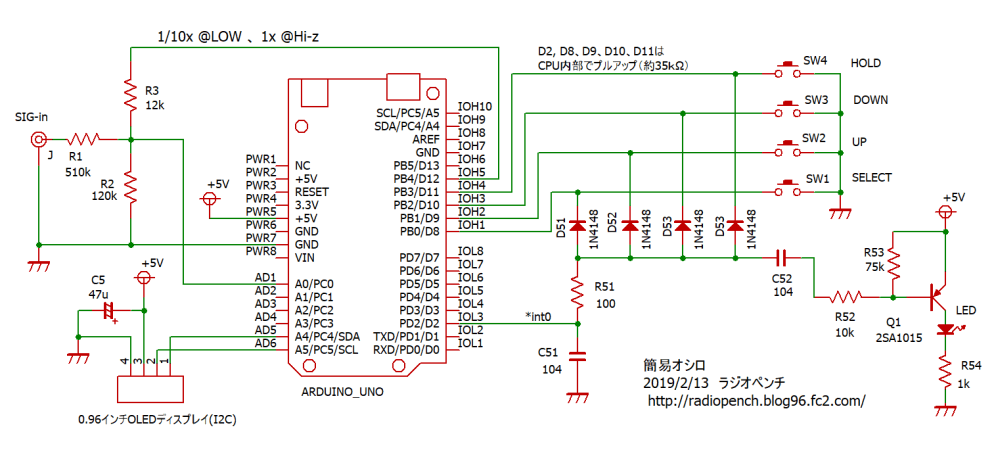
diagramas de proyecto
Notar: Asegúrese de que todas las conexiones en su circuito sean exactamente iguales a las que se muestran en los diagramas.
referencia :
http://radiopench.blog96.fc2.com/blog-entry-893.html
https://www.wikipedia.org/
codificado
- codificado
codificadoC/C++
/*
(_20190212_OLEDoscilloscope.ino)
1285byte ram free
2019/02/12
*/
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <avr/pgmspace.h> // PROGMEM
#include <EEPROM.h>
#define SCREEN_WIDTH 128 // OLED display width
#define SCREEN_HEIGHT 64 // OLED display height
#define REC_LENGTH 200 //
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
//
const char vRangeName[10][5] PROGMEM = {"A50V", "A 5V", " 50V", " 20V", " 10V", " 5V", " 2V", " 1V", "0.5V", "0.2V"}; // \0
const char * const vstring_table[] PROGMEM = {vRangeName[0], vRangeName[1], vRangeName[2], vRangeName[3], vRangeName[4], vRangeName[5], vRangeName[6], vRangeName[7], vRangeName[8], vRangeName[9]};
const char hRangeName[8][6] PROGMEM = {" 50ms", " 20ms", " 10ms", " 5ms", " 2ms", " 1ms", "500us", "200us"}; // (48
const char * const hstring_table[] PROGMEM = {hRangeName[0], hRangeName[1], hRangeName[2], hRangeName[3], hRangeName[4], hRangeName[5], hRangeName[6], hRangeName[7]};
int waveBuff[REC_LENGTH]; // (RAM)
char chrBuff[10]; //
String hScale = "xxxAs";
String vScale = "xxxx";
float lsb5V = 0.0055549; // 5V0.005371 V/1LSB
float lsb50V = 0.051513; // 50V 0.05371
volatile int vRange; // 0:A50V, 1:A 5V, 2:50V, 3:20V, 4:10V, 5:5V, 6:2V, 7:1V, 8:0.5V
volatile int hRange; // 0:50m, 1:20m, 2:10m, 3:5m, 4;2m, 5:1m, 6:500u, 7;200u
volatile int trigD; // 0:1:
volatile int scopeP; // 0:, 1:, 2:
volatile boolean hold = false; //
volatile boolean paraChanged = false; // true
volatile int saveTimer; // EEPROM
int timeExec; // (ms)
int dataMin; // (min:0)
int dataMax; // (max:1023)
int dataAve; // 10 max:10230)
int rangeMax; //
int rangeMin; //
int rangeMaxDisp; // max100
int rangeMinDisp; // min
int trigP; //
boolean trigSync; //
int att10x; // 1
void setup() {
pinMode(2, INPUT_PULLUP); // (int0
pinMode(8, INPUT_PULLUP); // Select
pinMode(9, INPUT_PULLUP); // Up
pinMode(10, INPUT_PULLUP); // Down
pinMode(11, INPUT_PULLUP); // Hold
pinMode(12, INPUT); // 1/10
pinMode(13, OUTPUT); //
// Serial.begin(115200); // RAM
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x64
// Serial.println(F("SSD1306 failed"));
for (;;); // Don't proceed, loop forever
}
loadEEPROM(); // EEPROM
analogReference(INTERNAL); // ADC1.1Vvref)
attachInterrupt(0, pin2IRQ, FALLING); //
startScreen(); //
}
void loop() {
digitalWrite(13, HIGH);
setConditions(); // RAM40
readWave(); // (1.6ms )
digitalWrite(13, LOW); //
dataAnalize(); // (0.4-0.7ms)
writeCommonImage(); // (4.6ms)
plotData(); // (5.4ms+)
dispInf(); // (6.2ms)
display.display(); // (37ms)
saveEEPROM(); // EEPROM
while (hold == true) { // Hold
dispHold();
delay(10);
}
}
void setConditions() { //
// PROGMEM
strcpy_P(chrBuff, (char*)pgm_read_word(&(hstring_table[hRange]))); //
hScale = chrBuff; // hScale
//
strcpy_P(chrBuff, (char*)pgm_read_word(&(vstring_table[vRange]))); //
vScale = chrBuff; // vScale
switch (vRange) { //
case 0: { // Auto50V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 1; //
break;
}
case 1: { // Auto 5V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 0; //
break;
}
case 2: { // 50V
rangeMax = 50 / lsb50V; //
rangeMaxDisp = 5000; // 100
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 3: { // 20V
rangeMax = 20 / lsb50V; //
rangeMaxDisp = 2000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 4: { // 10V
rangeMax = 10 / lsb50V; //
rangeMaxDisp = 1000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 5: { // 5V
rangeMax = 5 / lsb5V; //
rangeMaxDisp = 500;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 6: { // 2V
rangeMax = 2 / lsb5V; //
rangeMaxDisp = 200;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 7: { // 1V
rangeMax = 1 / lsb5V; //
rangeMaxDisp = 100;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 8: { // 0.5V
rangeMax = 0.5 / lsb5V; //
rangeMaxDisp = 50;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 9: { // 0.5V
rangeMax = 0.2 / lsb5V; //
rangeMaxDisp = 20;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
}
}
void writeCommonImage() { //
display.clearDisplay(); // (0.4ms)
display.setTextColor(WHITE); //
display.setCursor(86, 0); // Start at top-left corner
display.println(F("av V")); // 1
display.drawFastVLine(26, 9, 55, WHITE); //
display.drawFastVLine(127, 9, 55, WHITE); //
display.drawFastHLine(24, 9, 7, WHITE); // Max
display.drawFastHLine(24, 36, 2, WHITE); //
display.drawFastHLine(24, 63, 7, WHITE); //
display.drawFastHLine(51, 9, 3, WHITE); // Max
display.drawFastHLine(51, 63, 3, WHITE); //
display.drawFastHLine(76, 9, 3, WHITE); // Max
display.drawFastHLine(76, 63, 3, WHITE); //
display.drawFastHLine(101, 9, 3, WHITE); // Max
display.drawFastHLine(101, 63, 3, WHITE); //
display.drawFastHLine(123, 9, 5, WHITE); // Max
display.drawFastHLine(123, 63, 5, WHITE); //
for (int x = 26; x <= 128; x += 5) {
display.drawFastHLine(x, 36, 2, WHITE); // ()
}
for (int x = (127 - 25); x > 30; x -= 25) {
for (int y = 10; y < 63; y += 5) {
display.drawFastVLine(x, y, 2, WHITE); // 3
}
}
}
void readWave() { //
if (att10x == 1) { // 1/10
pinMode(12, OUTPUT); //
digitalWrite(12, LOW); // LOW
} else { //
pinMode(12, INPUT); // Hi-z
}
switch (hRange) { //
case 0: { // 50ms
timeExec = 400 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(1888); //
}
break;
}
case 1: { // 20ms
timeExec = 160 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(688); //
}
break;
}
case 2: { // 10 ms
timeExec = 80 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(288); //
}
break;
}
case 3: { // 5 ms
timeExec = 40 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(88); //
}
break;
}
case 4: { // 2 ms
timeExec = 16 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x06; // 64 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 56s
delayMicroseconds(24); //
}
break;
}
case 5: { // 1 ms
timeExec = 8 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x05; // 16 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 28s
delayMicroseconds(12); //
}
break;
}
case 6: { // 500us
timeExec = 4 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x04; // 16(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 16s
delayMicroseconds(4); //
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop");
}
break;
}
case 7: { // 200us
timeExec = 2 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x02; // :4(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) {
waveBuff[i] = analogRead(0); // 6s
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
}
break;
}
}
}
void dataAnalize() { //
int d;
long sum = 0;
//
dataMin = 1023; //
dataMax = 0; //
for (int i = 0; i < REC_LENGTH; i++) { //
d = waveBuff[i];
sum = sum + d;
if (d < dataMin) { //
dataMin = d;
}
if (d > dataMax) { //
dataMax = d;
}
}
//
dataAve = (sum + 10) / 20; // 10
// max,min
if (vRange <= 1) { // Auto1
rangeMin = dataMin - 20; // -20
rangeMin = (rangeMin / 10) * 10; // 10
if (rangeMin < 0) {
rangeMin = 0; // 0
}
rangeMax = dataMax + 20; // +20
rangeMax = ((rangeMax / 10) + 1) * 10; // 10
if (rangeMax > 1020) {
rangeMax = 1023; // 10201023
}
if (att10x == 1) { //
rangeMaxDisp = 100 * (rangeMax * lsb50V); // ADC
rangeMinDisp = 100 * (rangeMin * lsb50V); //
} else { //
rangeMaxDisp = 100 * (rangeMax * lsb5V);
rangeMinDisp = 100 * (rangeMin * lsb5V);
}
} else { //
//
}
//
for (trigP = ((REC_LENGTH / 2) - 51); trigP < ((REC_LENGTH / 2) + 50); trigP++) { //
if (trigD == 0) { // 0
if ((waveBuff[trigP - 1] < (dataMax + dataMin) / 2) && (waveBuff[trigP] >= (dataMax + dataMin) / 2)) {
break; //
}
} else { // 0
if ((waveBuff[trigP - 1] > (dataMax + dataMin) / 2) && (waveBuff[trigP] <= (dataMax + dataMin) / 2)) {
break;
} //
}
}
trigSync = true;
if (trigP >= ((REC_LENGTH / 2) + 50)) { //
trigP = (REC_LENGTH / 2);
trigSync = false; // Unsync
}
}
void startScreen() { //
display.clearDisplay();
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(10, 25); //
display.println(F("PM.GOHARIAN")); //
display.setCursor(10, 45); //
display.println(F("Pen oscope"));
display.display(); //
delay(5000);
display.clearDisplay();
display.setTextSize(1); //
}
void dispHold() { // Hold
display.fillRect(32, 12, 24, 8, BLACK); // 4
display.setCursor(32, 12);
display.print(F("Hold")); // Hold
display.display(); //
}
void dispInf() { //
float voltage;
//
display.setCursor(2, 0); //
display.print(vScale); //
if (scopeP == 0) { //
display.drawFastHLine(0, 7, 27, WHITE); //
display.drawFastVLine(0, 5, 2, WHITE);
display.drawFastVLine(26, 5, 2, WHITE);
}
//
display.setCursor(34, 0); //
display.print(hScale); // (time/div)
if (scopeP == 1) { //
display.drawFastHLine(32, 7, 33, WHITE); //
display.drawFastVLine(32, 5, 2, WHITE);
display.drawFastVLine(64, 5, 2, WHITE);
}
//
display.setCursor(75, 0); //
if (trigD == 0) {
display.print(char(0x18)); //
} else {
display.print(char(0x19)); //
}
if (scopeP == 2) { //
display.drawFastHLine(71, 7, 13, WHITE); //
display.drawFastVLine(71, 5, 2, WHITE);
display.drawFastVLine(83, 5, 2, WHITE);
}
//
if (att10x == 1) { // 10
voltage = dataAve * lsb50V / 10.0; // 50V
} else {
voltage = dataAve * lsb5V / 10.0; // 5V
}
dtostrf(voltage, 4, 2, chrBuff); // x.xx
display.setCursor(98, 0); //
display.print(chrBuff); //
// display.print(saveTimer); //
//
voltage = rangeMaxDisp / 100.0; // Max
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // *.**
} else { //
dtostrf(voltage, 4, 1, chrBuff); // **.*
}
display.setCursor(0, 9);
display.print(chrBuff); // Max
voltage = (rangeMaxDisp + rangeMinDisp) / 200.0; //
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else { //
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 33);
display.print(chrBuff); //
voltage = rangeMinDisp / 100.0; // Min
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else {
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 57);
display.print(chrBuff); // Min
//
if (trigSync == false) { //
display.setCursor(60, 55); //
display.print(F("Unsync")); // Unsync
}
}
void plotData() { //
long y1, y2;
for (int x = 0; x <= 98; x++) {
y1 = map(waveBuff[x + trigP - 50], rangeMin, rangeMax, 63, 9); //
y1 = constrain(y1, 9, 63); //
y2 = map(waveBuff[x + trigP - 49], rangeMin, rangeMax, 63, 9); //
y2 = constrain(y2, 9, 63); //
display.drawLine(x + 27, y1, x + 28, y2, WHITE); //
}
}
void saveEEPROM() { // EEPROM
if (paraChanged == true) { //
saveTimer = saveTimer - timeExec; //
if (saveTimer < 0) { //
paraChanged = false; //
EEPROM.write(0, vRange); //
EEPROM.write(1, hRange);
EEPROM.write(2, trigD);
EEPROM.write(3, scopeP);
}
}
}
void loadEEPROM() { // EEPROM
int x;
x = EEPROM.read(0); // vRange
if ((x < 0) || (x > 9)) { // 0-9
x = 3; //
}
vRange = x;
x = EEPROM.read(1); // hRange
if ((x < 0) || (x > 7)) { // 0-9
x = 3; //
}
hRange = x;
x = EEPROM.read(2); // trigD
if ((x < 0) || (x > 1)) { // 0-9
x = 1; //
}
trigD = x;
x = EEPROM.read(3); // scopeP
if ((x < 0) || (x > 2)) { // 0-9
x = 1; //
}
scopeP = x;
}
void pin2IRQ() { // Pin2(int0)
//pin8,9,10,11Pin2
//
int x; //
x = PINB; // B
if ( (x & 0x07) != 0x07) { // 3High
saveTimer = 5000; // EEPROM(ms
paraChanged = true; // ON
}
if ((x & 0x01) == 0) {
scopeP++;
if (scopeP > 2) {
scopeP = 0;
}
}
if ((x & 0x02) == 0) { // UP
if (scopeP == 0) { //
vRange++;
if (vRange > 9) {
vRange = 9;
}
}
if (scopeP == 1) { //
hRange++;
if (hRange > 7) {
hRange = 7;
}
}
if (scopeP == 2) { //
trigD = 0; //
}
}
if ((x & 0x04) == 0) { // DOWN
if (scopeP == 0) { //
vRange--;
if (vRange < 0) {
vRange = 0;
}
}
if (scopeP == 1) { //
hRange--;
if (hRange < 0) {
hRange = 0;
}
}
if (scopeP == 2) { //
trigD = 1; //
}
}
if ((x & 0x08) == 0) { // HOLD
hold = ! hold; //
}
}
diagramas
circuito