
Componentes y suministros
|
× | 1 | ||||
 |
|
× | 1 | |||
|
× | 1 | ||||
 |
|
× | 1 | |||
|
× | 1 |
Aplicaciones y servicios en línea
|
||||
 |
|
Acerca de este proyecto
Normalmente vemos drones controlados mediante un mando a distancia RF, o para un piloto automático mediante un módulo GPS para controlarlo automáticamente dándole la dirección correcta. Pero en mi proyecto abordé las cosas de otra manera utilizando un Arduino Uno.
El objetivo principal de este proyecto es recopilar datos e información de video 2D de un área conocida en particular. Para obtener la información, necesitamos asignar los valores de largo y ancho que el dron puede viajar usando la programación de Arduino.
Como sugiere el nombre, el piloto automático significa que el dron será administrado por sí mismo, mientras que el control de la acción del dron estará a cargo de un controlador de vuelo con sensores incorporados para equilibrar el dron. Un Arduino Uno es el cerebro del sistema, dando la señal correcta al controlador de vuelo. Para mantener la estabilidad y el funcionamiento sostenido, utilicé un microcontrolador OpenPilot CC3D (o cualquier controlador de vuelo), junto con una cámara para capturar datos en vivo con sensores de monitoreo del clima. Finalmente, el sistema incluye un módulo Bluetooth para apagar/apagar el dron y ver datos en vivo usando un dispositivo móvil Android.
ARDUINO UNO
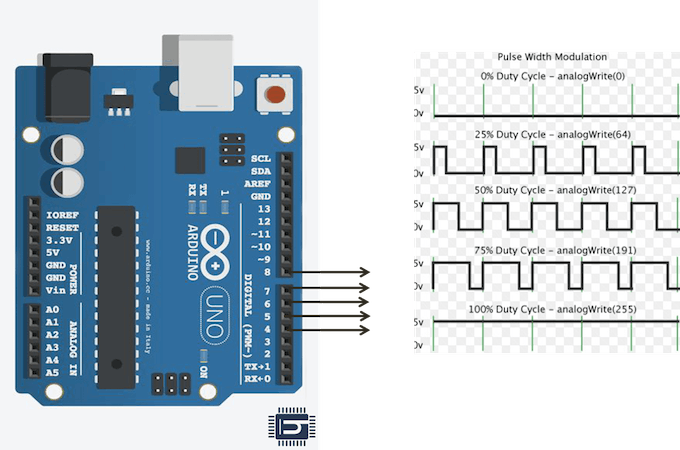
Como sabemos, el Arduino Uno es un controlador Atmega Micro. aquí generé señales PWM para controlar el dron.
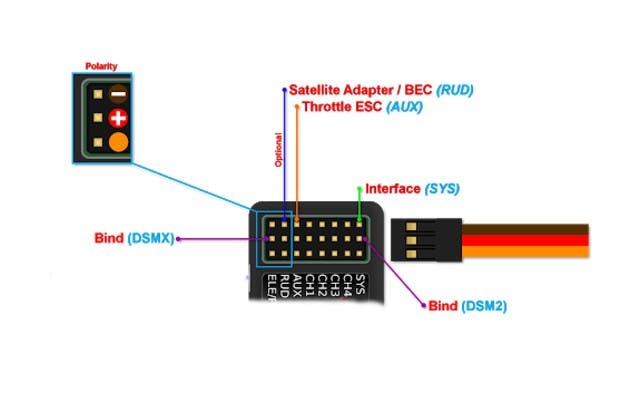
Controlador de vuelo CC3D:
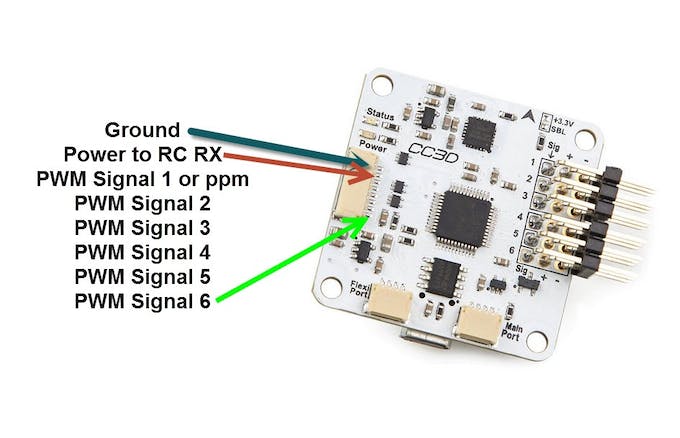
Como vimos en la figura anterior, el controlador de vuelo tiene incorporado un giroscopio y un controlador de aceleración y funciones de autonivelación.
Pero esta empresa de microcontroladores proporciona su propio software para programarlo y es fácil de usar.
estos microcontroladores necesitan una señal PWM de entrada para controlar motores BLDC individuales. estas señales serán generadas por arduino uno.
TIPOS DE DISEÑOS DE DRONES
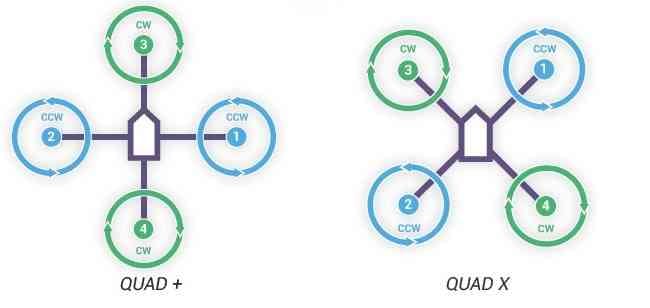
como ves arriba, hay dos tipos de diseños de drones disponibles para drones de formato cuádruple, dependiendo de la dirección en la que coloques el controlador de vuelo, puedes elegir el formato cuádruple
la indicación de dirección se imprimirá de acuerdo a los controladores de vuelo elegidos, dependiendo del formato elegido, la dirección de la hélice también es la más importante, CW (sentido horario) y CCW (sentido antihorario).
CONEXIÓN ESC
AGUJAS DEL RELOJ

En el sentido de las agujas del reloj, necesitamos conectar los cables como se muestra arriba
En Contra del sentido del reloj
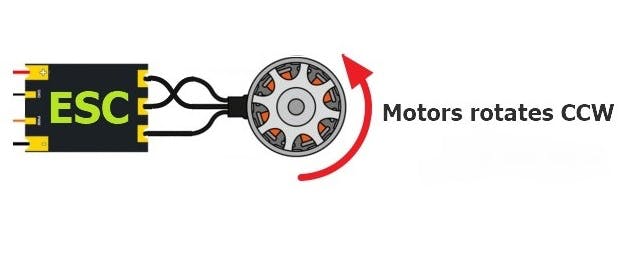
Para el sentido contrario a las agujas del reloj necesitamos intercambiar dos cables para que la fase de un voltaje se aplique al motor para que cambie la dirección del motor
CONEXIÓN MOTOR-ESC-CONTROLADOR DE VUELO
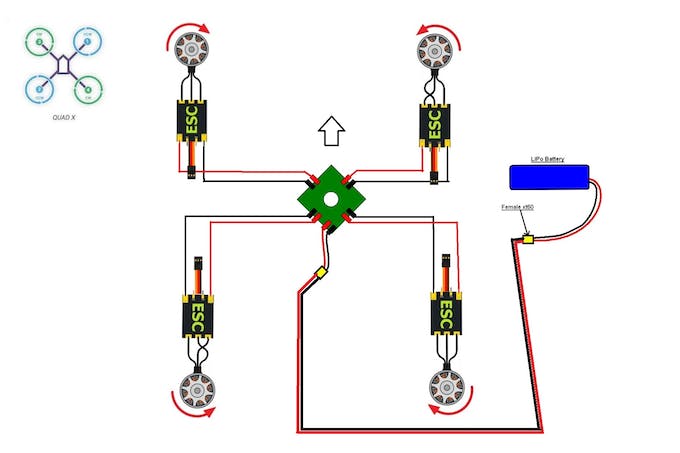
CONEXIÓN MANDO ESC
ESC también tiene 3 hilos con 2 cables de alimentación,
estos 3 cables tienen el pin VCC, TIERRA y SEÑAL DE ENTRADA que toma datos del CONTROLADOR DE VUELO para hacer girar los motores BLDC.
los otros 2 cables son cables de alimentación diseñados para una corriente más alta, así que use cables más gruesos, y estos cables son comunes con la batería.
ESQUEMA ELÉCTRICO FINAL CON ARDUINO UNO
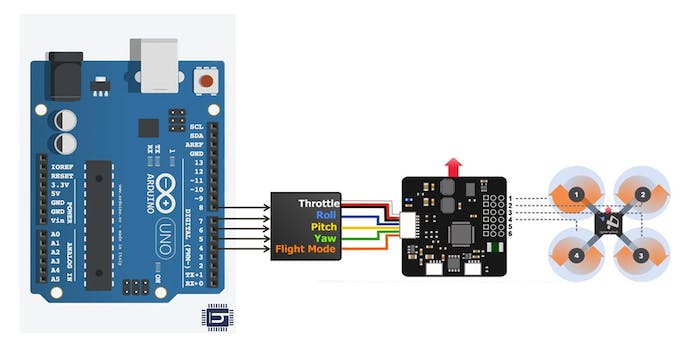
aquí utilicé un protocolo UART pero ningún dato se convierte de paralelo a serie. Las señales PWM directas se aplican desde arduino a CC3d para retrasar.
APLICACIÓN MOVIL

El complemento anterior muestra la aplicación de Android que se crea utilizando un sitio web de código abierto que se menciona a continuación. usando esta aplicación podemos encender y apagar el dron. y tener otra característica que nos permita obtener los datos del sensor en la ventana serie, es decir, un teléfono móvil.
botones
inicio: este botón inicia el microcontrolador (controlador de vuelo CC3D)
mov: esto hace que el dron vuele y haga su operación la cual esta programada dentro del arduino Uno
detener: este es un botón de parada de emergencia para apagar el dron (debido al piloto automático del dron, no hay control remoto presente, por lo que se proporciona un botón adicional)
sensor de arranque: cuando se presiona, muestra los datos del sensor en una pantalla blanca que se muestra a continuación
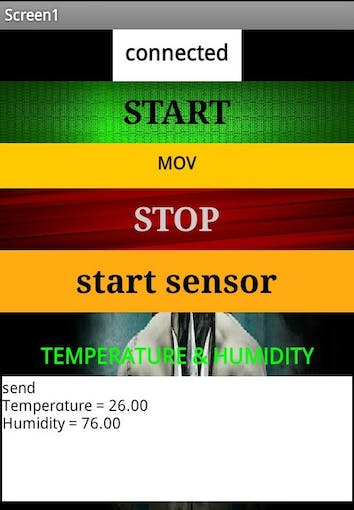
podemos ver en esta figura que los valores de temperatura y humedad se mostrarán cuando se presione el botón del sensor de inicio.
codificado
Enlace del código principal
diagramas
Se utilizan dos resistencias como divisor de voltaje para reducir los 5 voltios a 3,3 voltios para que Bluetooth pueda recibir datos del Arduino Uno.
El circuito es tan simple y pequeño que solo hay que hacer unas pocas conexiones.
Pines de Arduino Pines de Bluetooth
RX (pin 0) ———-> TX
TX (pin 1) ———-> RX
5V ———->VCC
Tierra ———-> Tierra


